
Open Traceable Time Platform
Development blog
2016-09-18 Laser cut panels received
The panels for the enclosure are back and we're doing a final test before sending the PCBs off for stuffing. Pictures soon.2016-08-20 Printed circuit boards ready
The first run of printed circuit boards has been received and the front panels for the enclosures have been sent off for laser-cutting.2016-07-20 Time-transfer results from the NVS NV08 GNSS receiver
We have been testing the NVS NV08 GNSS receiver for suitability as a L1 time-transfer receiver. The CGGTTS data plot below shows a common-clock comparison between a Javad receiver and a NVS receiver, with both receiver antennas having cm-accurate positions. The RMS residual difference between the difference of the two data sets and a linear fit to the same is 3 ns.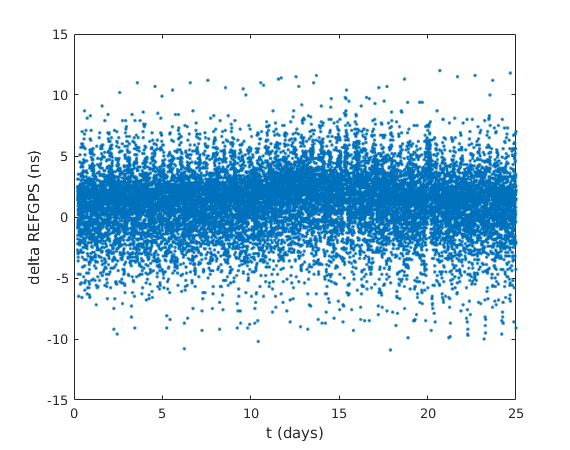
OTTP

Last updated: July 20 2016 17:24:55